
Hello there!
KiLLA’s got some new stuff to share 😉
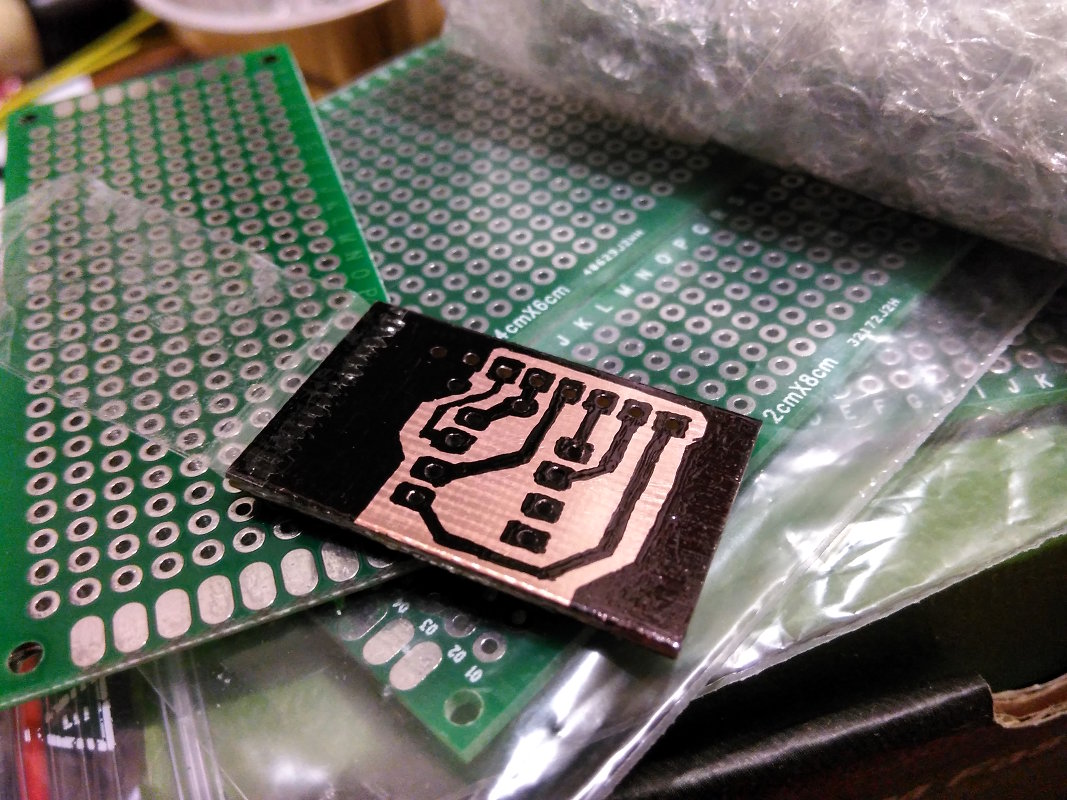
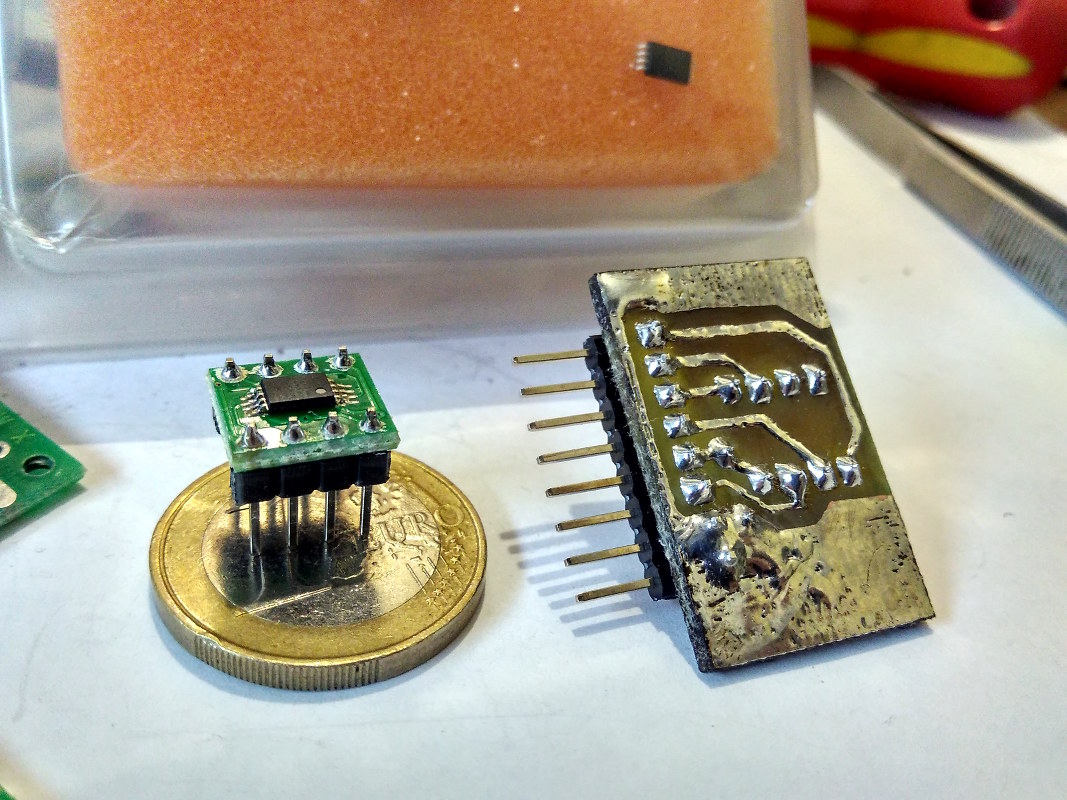
I have plans to use most of these ICs @ 12MHz SPI so i made proper shield instead of breadboard because some guy found it too noisy to work properly that way(link at bottom).
The shield is drilled a bit off axis as i did make it fast with 550W handheld drill 😛
First tests with built in libraries reach sort of low speeds, probably due to latency growing with bus speed, getting ~20kB/s with byte transfer for both writing and reading @ 12MHz and ~50kB/s for 4MHz SPI 🙄
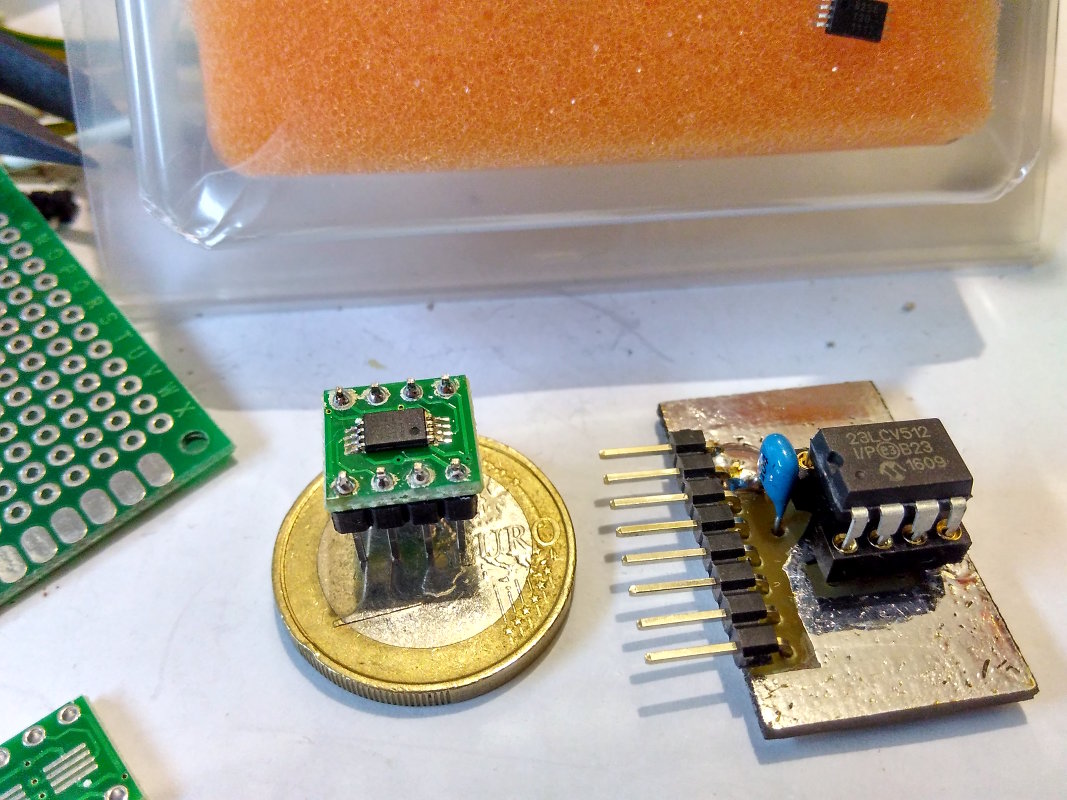
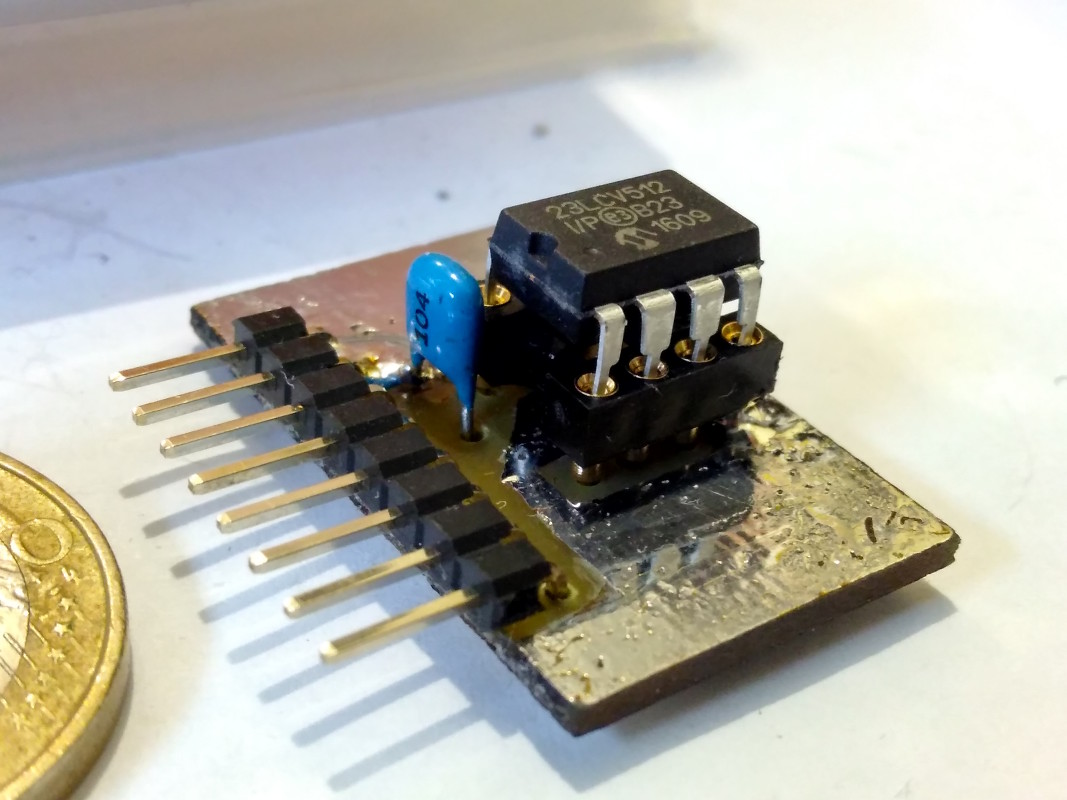
SRAM ICs:
23LCV512-I/P 64kx8bit SRAM 20MHz SPI – TESTED WORKING up to 12MHz
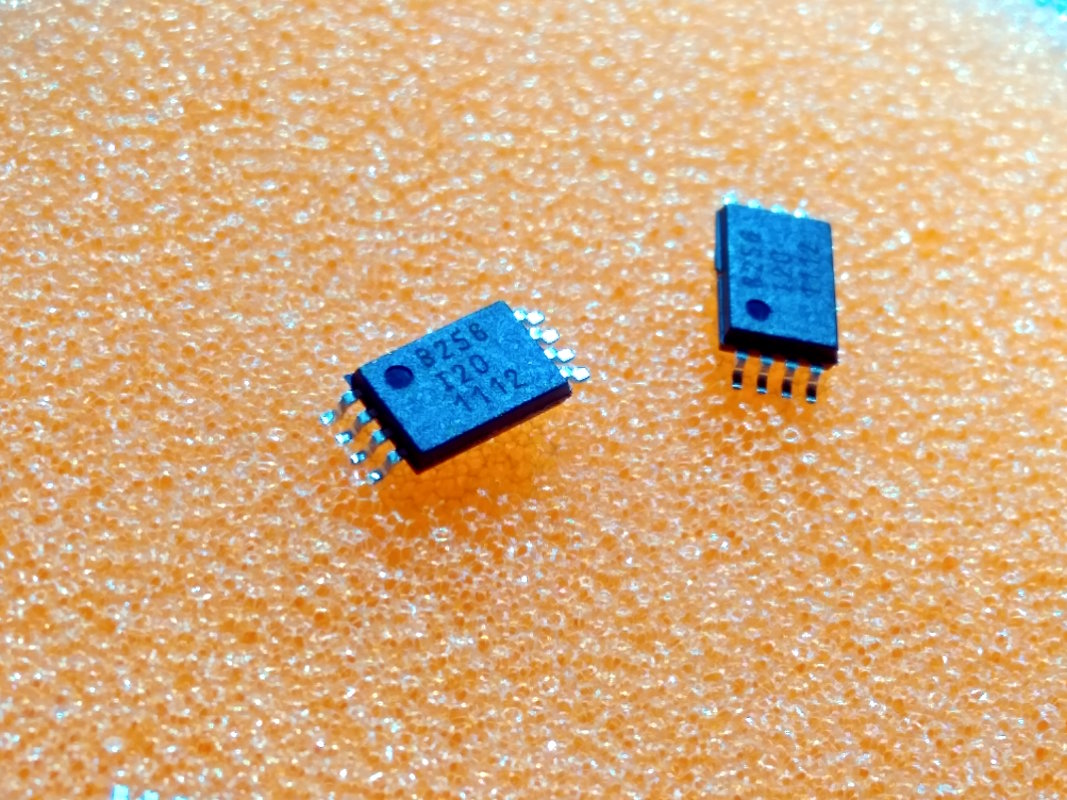
IP12B256I-TU 32kx8bit SRAM 20MHz SPI
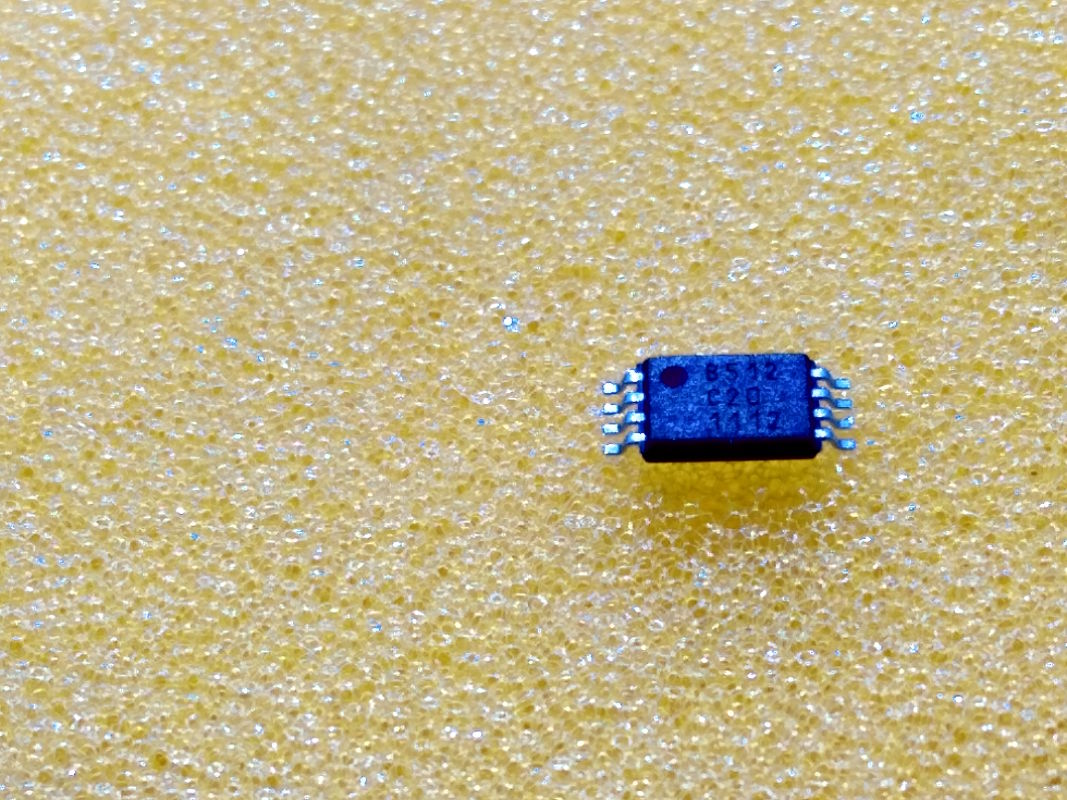
IP12B512C-TU 64kx8bit SRAM 20MHz SPI
todo:
# do some more tests..speed!!!
# find fastest library or make own, this guy juiced off ~120kB/s
usefull info:
the noisy guy:
https://dave.cheney.net/2014/01/25/avr11-building-an-spi-sram-shield-for-an-arduino-mega
microchip 23xx spi pinout:

Simplest SRAM library i found:
https://github.com/panStamp/sram
SRAM library:
https://github.com/SV-Zanshin/MicrochipSRAM/blob/master/MicrochipSRAM.cpp
This library example compiles, but throws errors on serial monitor running on Arduino:
https://github.com/MattairTech/SRAM_23LC