EDM Machine
status: initial version done and working, making 2nd version
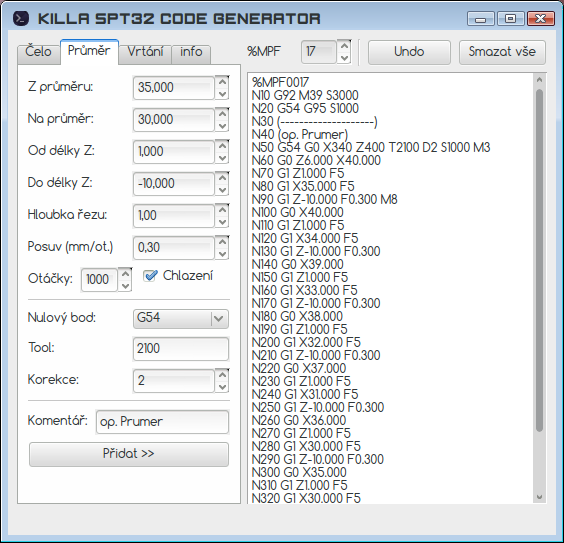
SPT32 Code generator
status: first version done and been used for >year, making new version which will generate strategy as well, with animated simulation, all from scratch
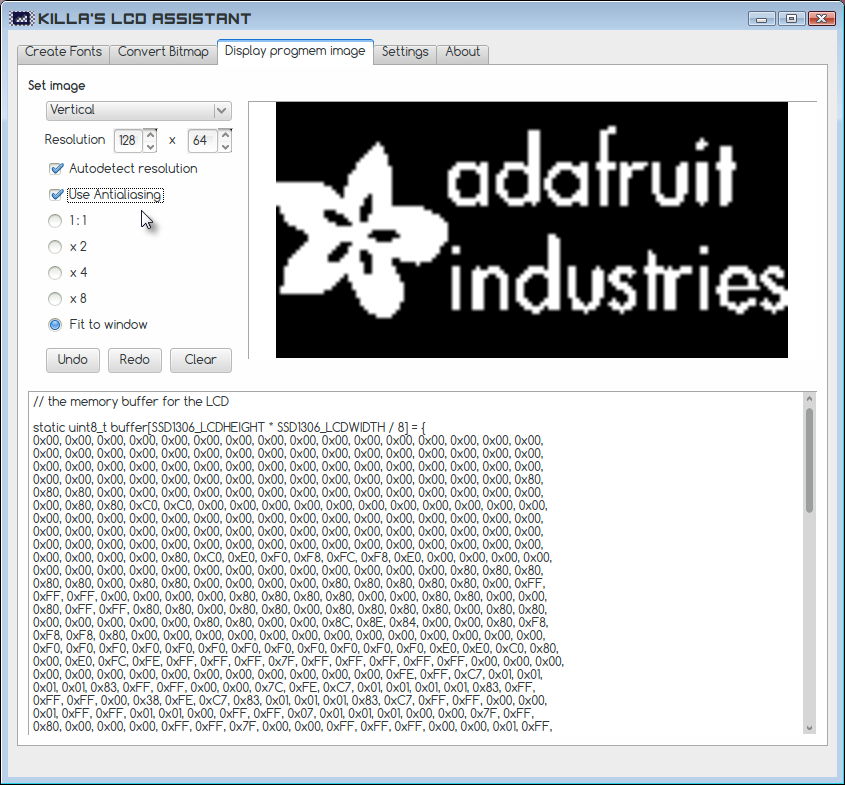
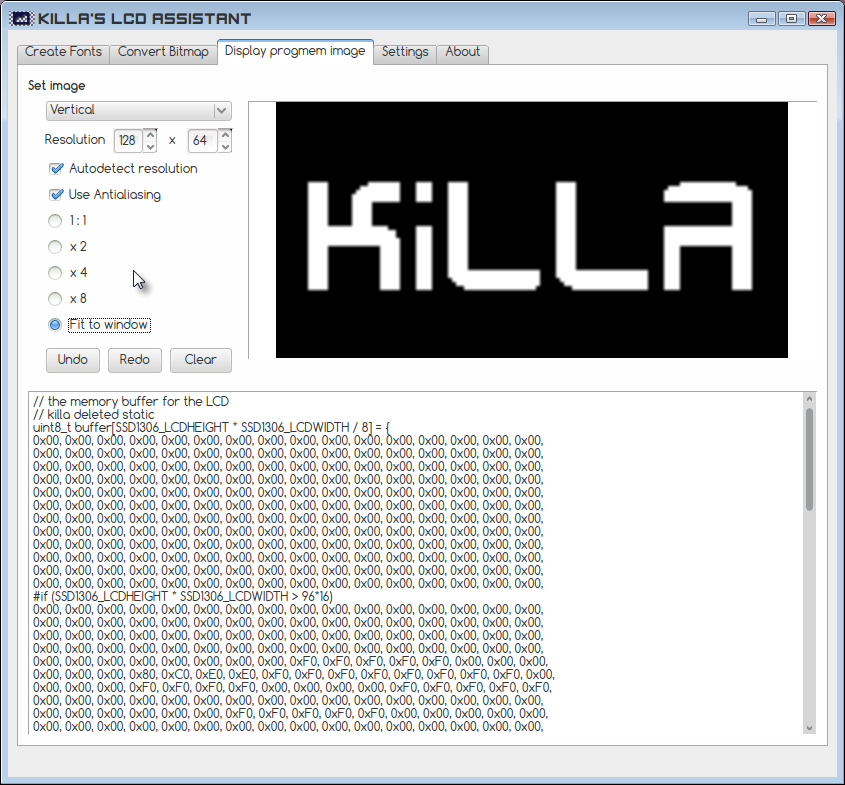
LCD Assistant
status: display image done and feature almost complete(add invert), font creator needs new gui(but is working nicely), convert image has problems with bmp files due to widely used nonstandard headers -> needs work
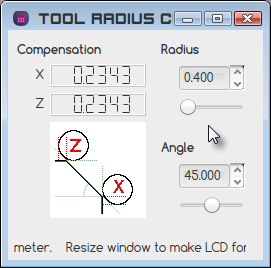
TNR Calculator
status: initial version done and being used, making 2nd version with better graphics showing the workpiece angle and tool nose
RFID Access system – Door lock
-esp8266 based control for electric door lock, with advanced(js!) and polished(css, anims) web interface for mid-secure RFID administration
status: initial version done and shiny, but overwriting storage of data
RFID Access system – Software control
-esp8266 based server/client sends UDP packets to LOGIN/ACCESS certain software, secured with handshake, no web interface, config in EEPROM
status: done and being applied on more computers at the time, making esp8266 (Arduino IDE due to multiplatform), Python2 and Autoit3 examples to share